AI for Robotics Final Project
AI4R's final project was a bit different than you might expect... In fact, we were asked to track and predict the motion of an object that care barely be called a "robot" at all - a HEXBUG (Example on YouTube). Somebody at GT (presumably) constructed a wooden box for the robot, and then put a circular candle in the center as an obstacle. A video camera was mounted above the scene, and they put the hexbug in and recorded the results. ...
AI4R - The Robot Platform
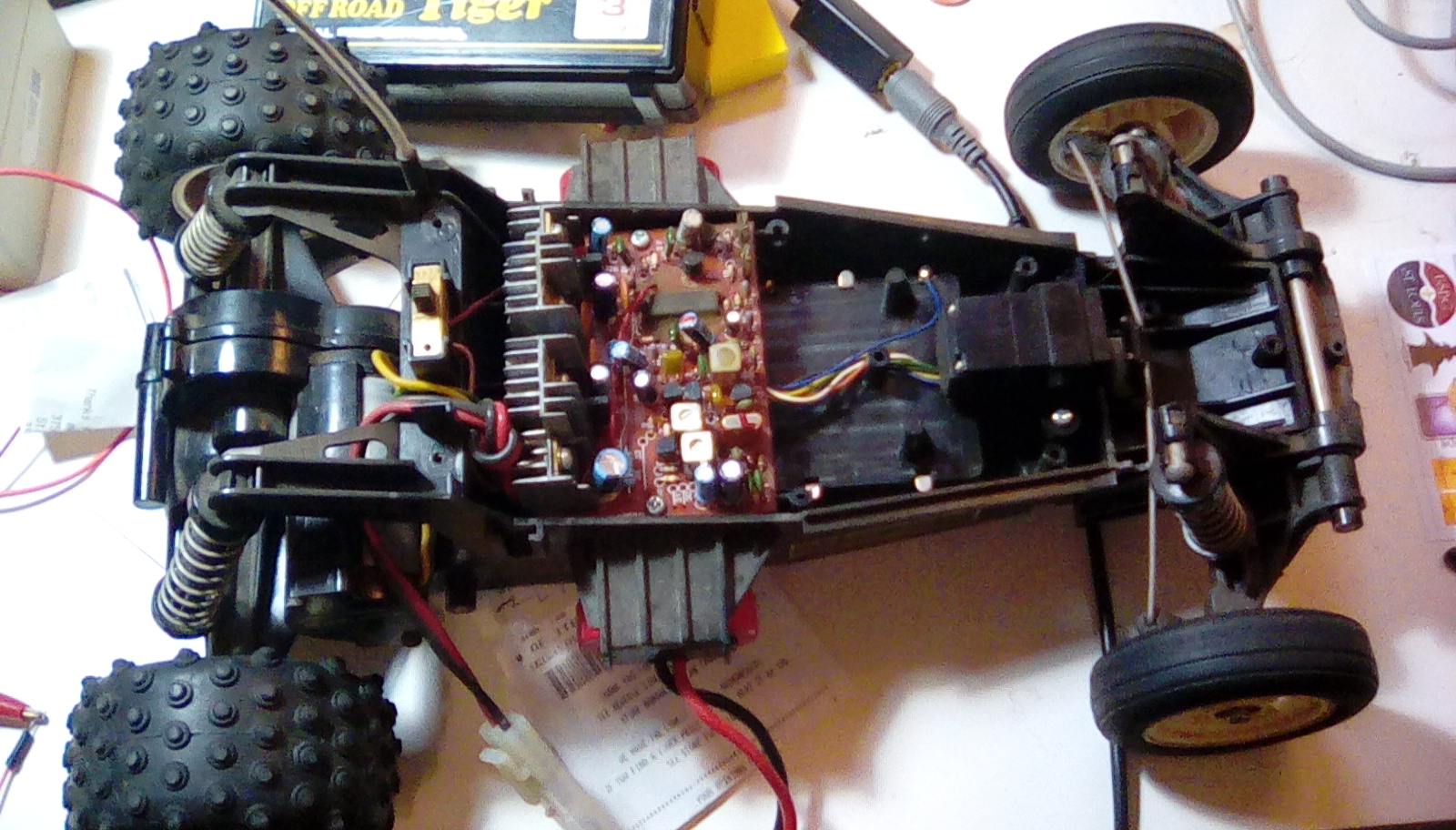
My autonomous robot project will be based around an old toy Radioshack RC car I had as a kid. This thing was pretty good, however. It had an adjustable (proportional) throttle and steering, instead of the cheaper and more-common "all or nothing" approach. The motor looked pretty beefy and I had an RC battery and charger for it, so I thought things would be pretty smooth sailing.
 Posted by
Matt Good
on Thu 08 September 2016
Posted by
Matt Good
on Thu 08 September 2016
Artificial Intelligence for Robotics
It's officially the Fall 2016 semester of the GT OMS CS program, and this is a big one - Artificial Intelligence for Robotics. I've been looking forward to this class for years. The course is taught by Sebastian Thrun, who headed up the Stanford team that won the DARPA Grand Challenge and came in second in the DARPA Ubran Challenge. The Grand Challenge robot...