Link Set: .NET Logging
Selected links highlighting what worked for recent .NET logging work.
Stupid Computer Tricks - Best Hiking Path
A one-off project to find good hiking paths through a terrain, given how much vertical changes should be avoided. The technique involves treating a raster image as if it were a graph, weighting the edges appropriately, and running Dijkstra's shortest path algorithm on it.
IMU Software Tutorial [YouTube]
I recently ran across this short (13:15) video tutorial describing the process and math of figuring out your position and orientation from an IMU. It was a quick overview at just the right level of detail to connect a lot of the different concepts that I have been thinking about for the rover project.
For the rover, simply getting orientation information out of an AHRS algorithm isn't going to be enough. I also need...
GPS is weird and awesome and terrible
A very after-the-fact robot update from late 2016: GPS works. This is perhaps more awesome than it sounds.
First, if you want a good rant about how GPS communication is terrible, check out this article. It's a magnificent rant about how you never really get your true state or know what time a particular state refers to with GPS, due to a pretty nonstandard standard (NMEA), which itself was due to the "N" in "NMEA" standing for...
AI for Robotics Final Project
AI4R's final project was a bit different than you might expect... In fact, we were asked to track and predict the motion of an object that care barely be called a "robot" at all - a HEXBUG (Example on YouTube). Somebody at GT (presumably) constructed a wooden box for the robot, and then put a circular candle in the center as an obstacle. A video camera was mounted above the scene, and they put the hexbug in and recorded the results. ...
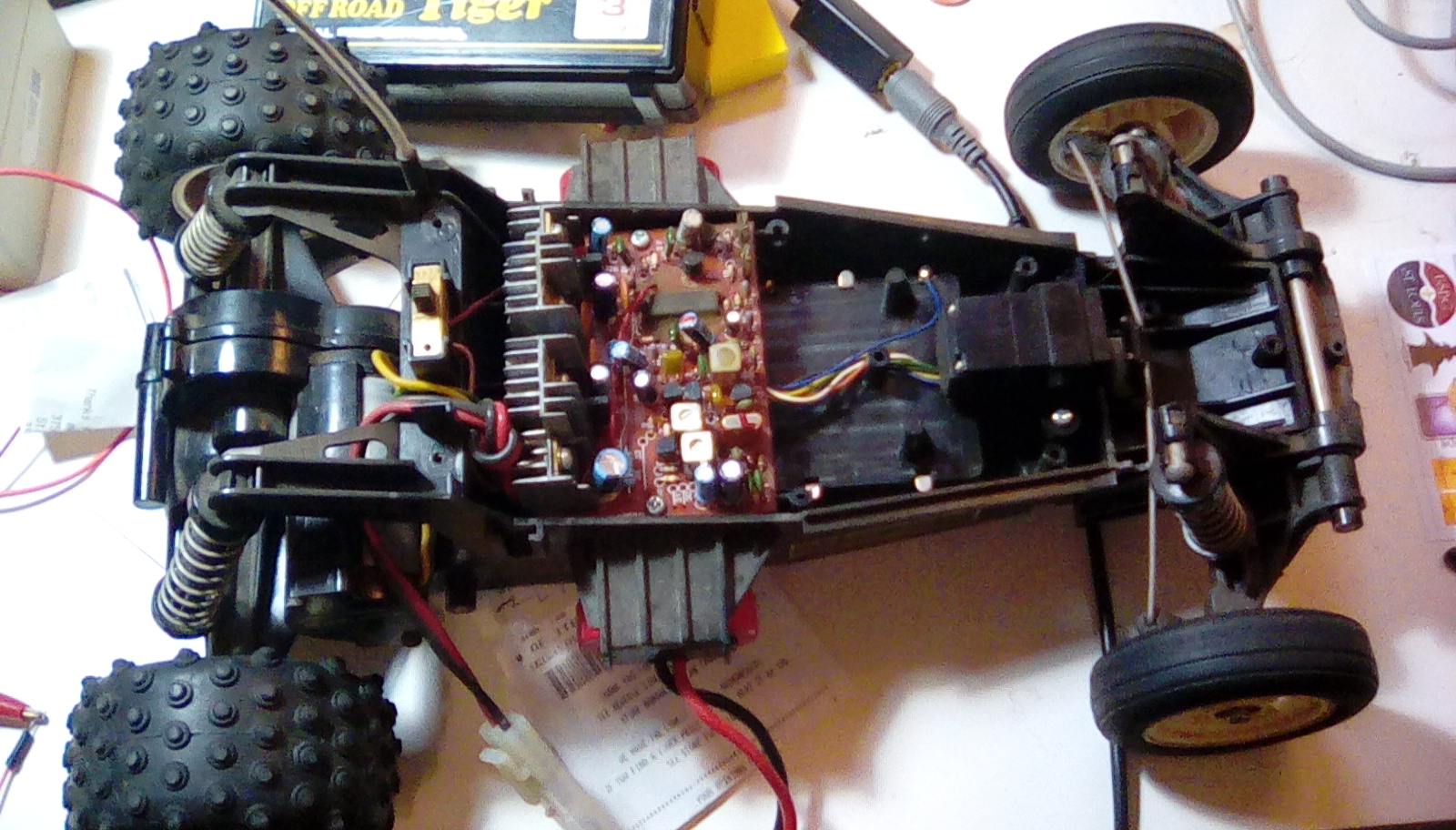
AI4R - The Robot Platform
My autonomous robot project will be based around an old toy Radioshack RC car I had as a kid. This thing was pretty good, however. It had an adjustable (proportional) throttle and steering, instead of the cheaper and more-common "all or nothing" approach. The motor looked pretty beefy and I had an RC battery and charger for it, so I thought things would be pretty smooth sailing.
 Posted by
Matt Good
on Thu 08 September 2016
Posted by
Matt Good
on Thu 08 September 2016
Artificial Intelligence for Robotics
It's officially the Fall 2016 semester of the GT OMS CS program, and this is a big one - Artificial Intelligence for Robotics. I've been looking forward to this class for years. The course is taught by Sebastian Thrun, who headed up the Stanford team that won the DARPA Grand Challenge and came in second in the DARPA Ubran Challenge. The Grand Challenge robot...
Computational Photography Portfolio
It's all over but the grading for my Computational Photography class, so I thought I would share the final portfolio PDF I put together. The document showcases all the assignments from the course, and summarizes the goal for each, so even if you don't know much about CP, it should at least be a little bit interesting.
Computational Photography - Depth from Stereo Images
I am just about at the end of my 4th class in the GT OMS CS program - Computational Photography. This was my first summer semester, and I took a two-week vacation in the middle of it, and I had some storm damage to my house during the semester as well - so I was not able to give it as much concentration as it probably deserved. I don't think I'm going to do a summer...