IMU Software Tutorial [YouTube]
I recently ran across this short (13:15) video tutorial describing the process and math of figuring out your position and orientation from an IMU. It was a quick overview at just the right level of detail to connect a lot of the different concepts that I have been thinking about for the rover project.
For the rover, simply getting orientation information out of an AHRS algorithm isn't going to be enough. I also need...
SparkFun GP-20U7 GPS PPS Note
I have this SparkFun GP-20U7 GPS Receiver. It seems to work pretty well. I'm changing around my approach to the autonomous robot, and now I need access to the PPS (Pulse-Per-Second) functionality of the unit. The PPS pad isn't broken out on this device - it's under a pile of red goop you have to scrape off, and is actually part of an unpopulated LED circuit. It's not immediately clear (to me, anyway) how to wire it up to a...
GPS is weird and awesome and terrible
A very after-the-fact robot update from late 2016: GPS works. This is perhaps more awesome than it sounds.
First, if you want a good rant about how GPS communication is terrible, check out this article. It's a magnificent rant about how you never really get your true state or know what time a particular state refers to with GPS, due to a pretty nonstandard standard (NMEA), which itself was due to the "N" in "NMEA" standing for...
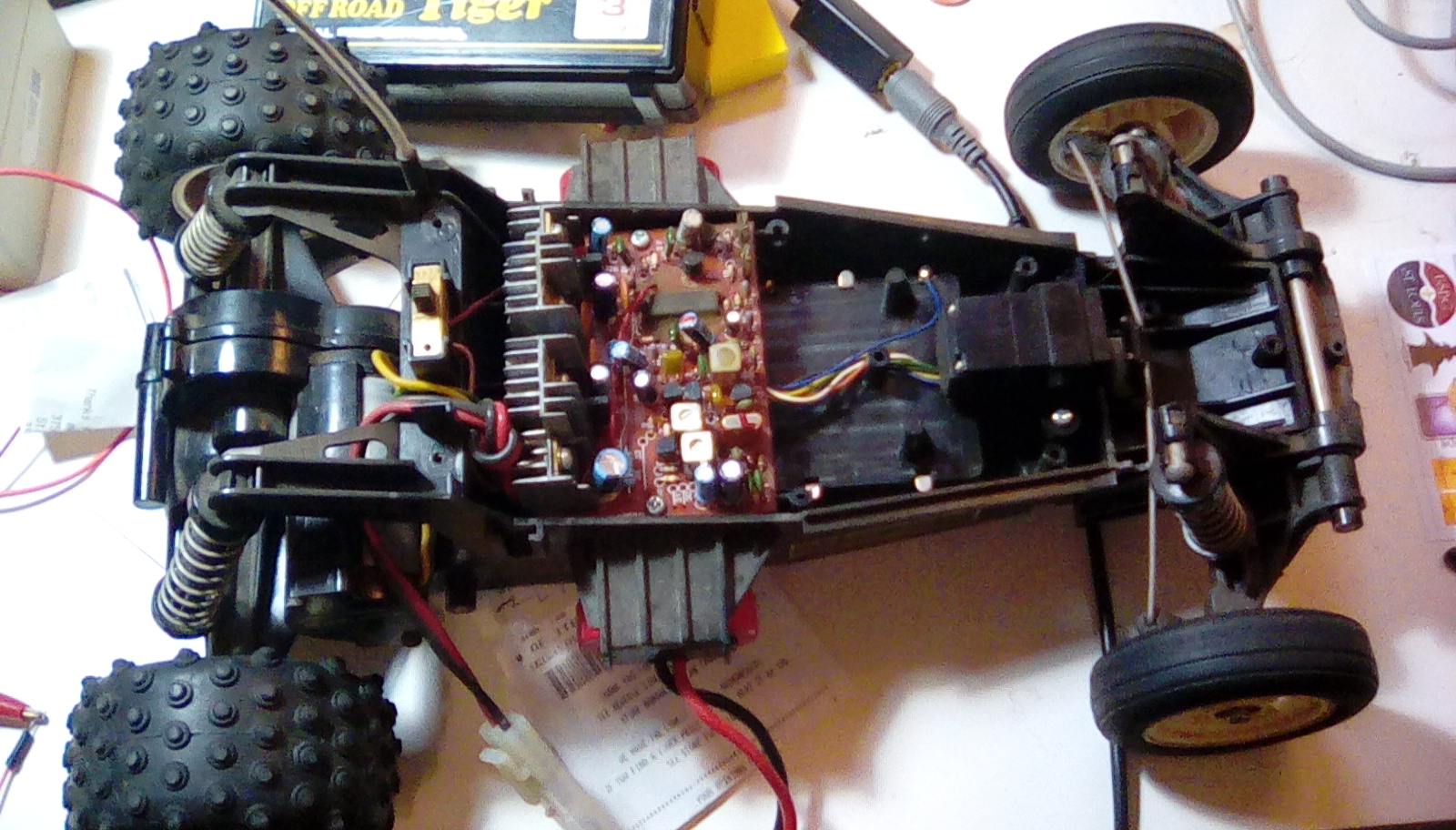
AI4R - The Robot Platform
My autonomous robot project will be based around an old toy Radioshack RC car I had as a kid. This thing was pretty good, however. It had an adjustable (proportional) throttle and steering, instead of the cheaper and more-common "all or nothing" approach. The motor looked pretty beefy and I had an RC battery and charger for it, so I thought things would be pretty smooth sailing.
 Posted by
Matt Good
on Thu 08 September 2016
Posted by
Matt Good
on Thu 08 September 2016